myCobot 320 for M5

1 Structural Parameters
1.1 Robot Parameters
| Index | Parameter |
|---|---|
| Name | Elephant Collaborative Robotic Arm |
| Model | M5 |
| Degrees of Freedom | 6 |
| Efficient Load | 1kg |
| Working Radius | 350mm |
| Repeated Positioning Precision | ±0.5mm |
| Weight | 3.3kg |
| Power Input | 24V, 9.4A |
| Operating Temperature | 0 - 45℃ |
| Communication Interface | Bluetooth/Type-C |
1.2 Workspace
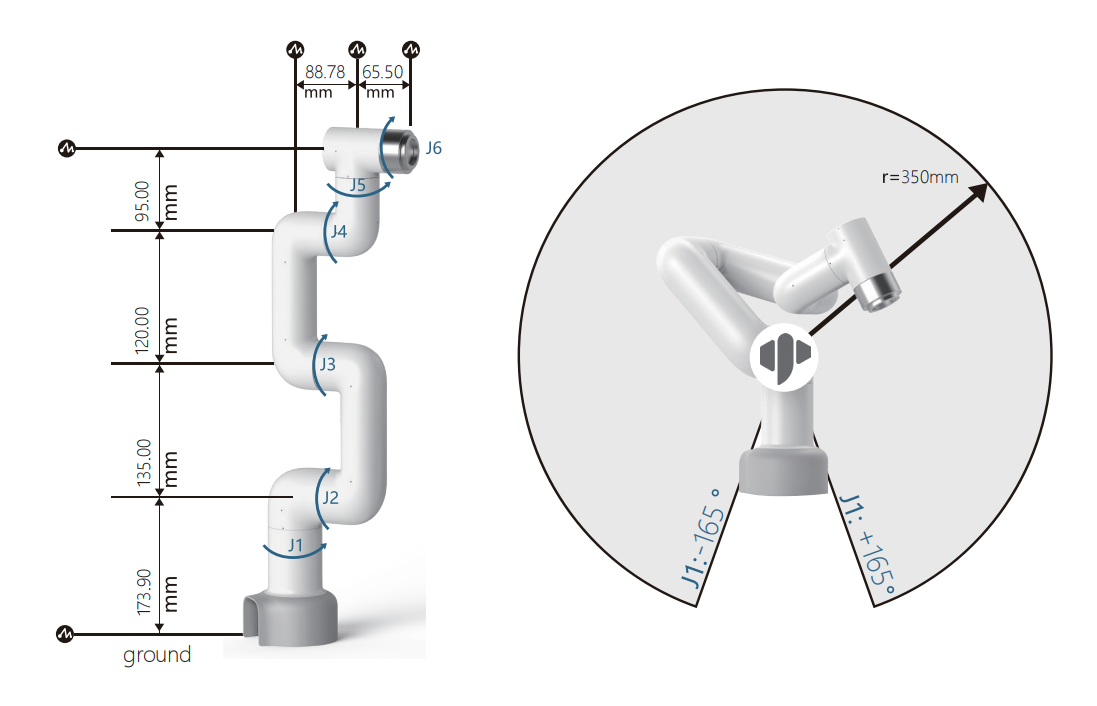
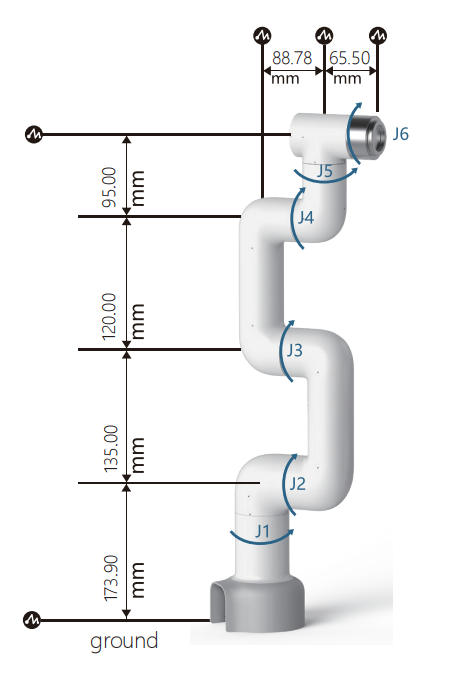
1.3 Specifications and Dimensions
1.4 Motion Angles of Joints
| Joint | Angle |
|---|---|
| J1 | -165~ +165 |
| J2 | -165~ +165 |
| J3 | -165~ +165 |
| J4 | -165~ +165 |
| J5 | -165~ +165 |
| J6 | -175 ~ +175 |
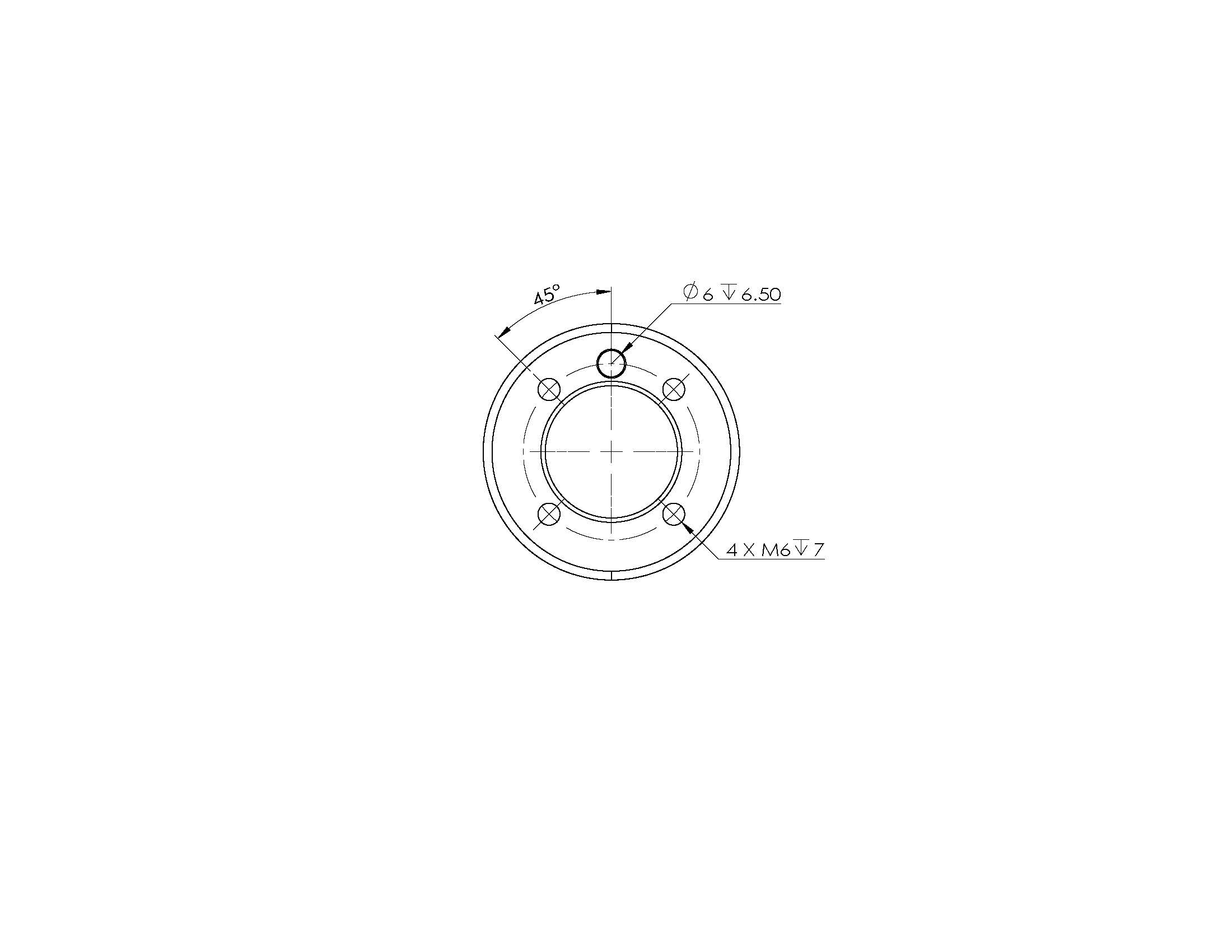
1.5 Installation of Hole
- The base is mounted with flange and is compatible with both installation of LEGO and M6 screw.
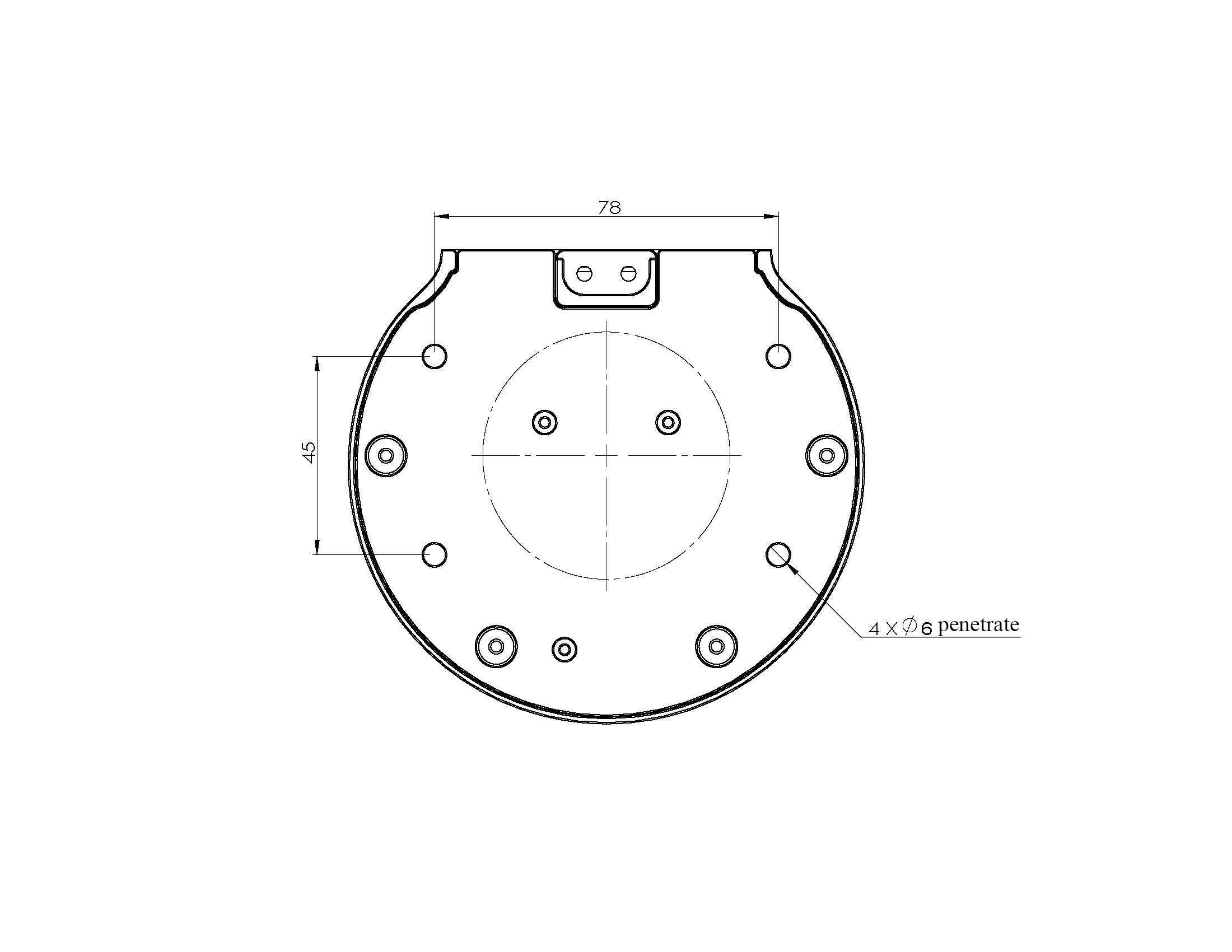
- The end of the arm is compatible with both LEGO component holes and threaded holes.
2 Hardware Parameters
| Items | Parameter |
|---|---|
| Core | 240MHz dual core. 600 DMIPS, 520KB SRAM. Wi-Fi, dual mode Bluetooth |
| Flash | 4MB |
| CPU | 240MHz dual core. 600 DMIPS, 520KB SRAM. Wi-Fi, dual mode Bluetooth |
| Bluetooth | 2.4G/5G |
| Wireless type | 2.4G 3D Antenna |
| Core type | M5Stack-basic/Atom/Pico |
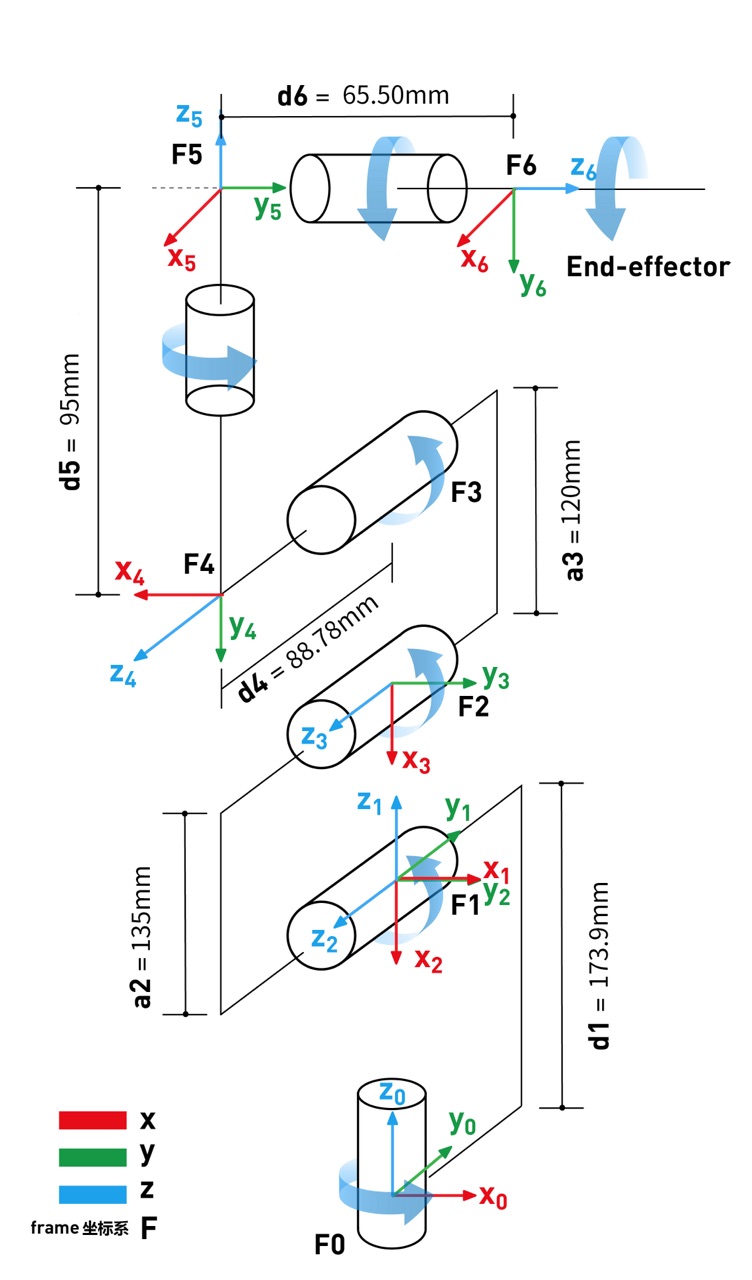
3 DH Parameters